New 3 DOF fully articulated leg

This is my initial plan for the biped section of my new android. The construction of the real thing looks strikingly similar to my original idea.
I was thinking about using standard off the shelf parts like easily accessible gearmotors and boxes so the robot could be constructed easily cheaply and quickly.
The robot assembly has 3 degrees of freedom in each leg which means it can perform similar movements to a human leg.
Each joint uses a Como Drill 810:1 ratio motor for maximum torque for at low weight. The motors are coupled to potentiometers giving positional feedback. The whole thing is controlled by a Picaxe microcontroller run as a servocontroller.
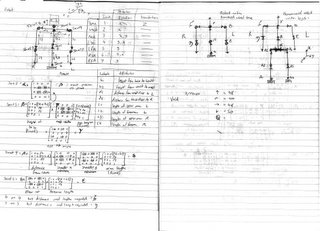
Im planning to create a 3D computer model of the robot using the Direct X API so when I write the rest of the control software the robot will have a spatial model of itself. I plan to use Denavit Hartenburg 3Dimensional coordinates do the robot will know exactly (by measurement) where all of its joints are at any given time. See below
posted by c6jones720 at 1:01 AM
![]()

0 Comments:
Post a Comment
<< Home