High Power Servo Electronics
Now Ive made a pair of 3-DOF legs I have only to attach them to each other. I am literally building this robot from the bottom up. I intend to use standard Picaxe 18 chips as positioning servos for each of the robot joints.
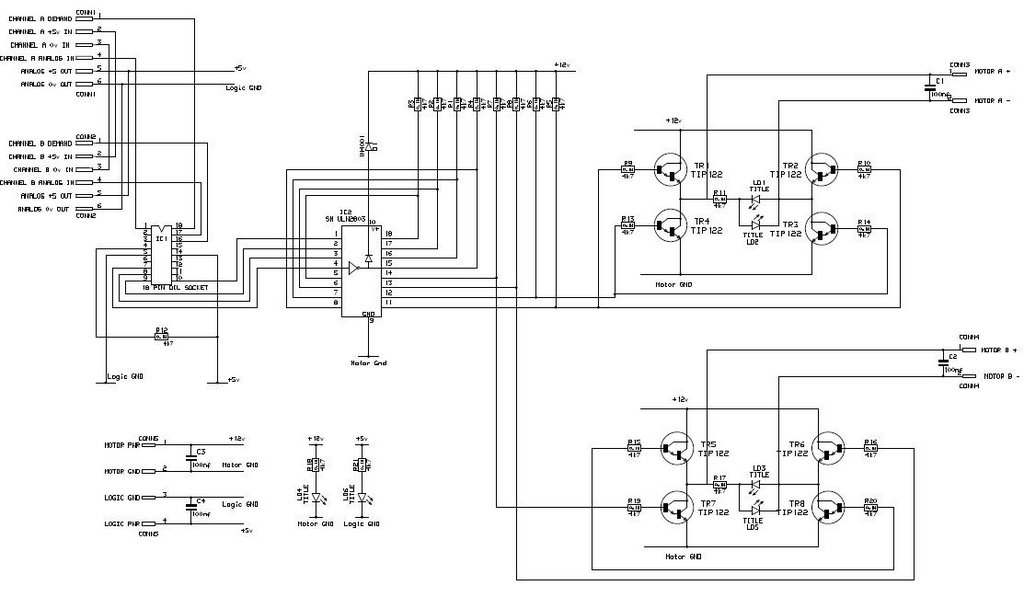 Here is the schematic in jpeg form. IC1 is a standard Picaxe 18 chip. I will use it to read in two streams of standard 1-18ms PWM from a servo controller and convert that into positional output for two motors.
Here is the schematic in jpeg form. IC1 is a standard Picaxe 18 chip. I will use it to read in two streams of standard 1-18ms PWM from a servo controller and convert that into positional output for two motors.Ive used this circuit on older robots and coupled with the Como 810:1 motors you have quite a powerful servo. In theory each servo will have a torque in the region of 3.3Nm at 12v over a travel range of about 180 degrees.
The H-bridge is only a bipolar one but should be good for about 60 watts. I might use MOSFETs later on depending on how well it performs.
posted by c6jones720 at 12:24 AM
![]()

0 Comments:
Post a Comment
<< Home