Robot Calibration
I have just put the first servo onto my robot. I am literally starting fromthe bottom up so the first motors I wired up and the ankle Y and Z roll motors. I have designed and breadboarded my own 8-channel Serial servo Controller unit so up to 8 servos can be controlled at any one time. This will eventually be on the same board as the 16 channel multiplexer unit.

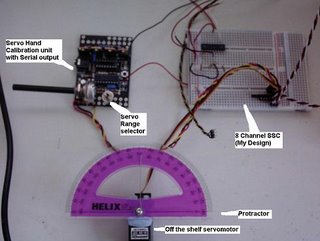
I built a hand calibration unit that can output a signal to a single servo motor. The point of this is that you can set a demand angle for the servo and read back (using a protactor) the angle that the servo shaft actually went to. This allows you to adjust feedback potentiometer alignments or gearboxes etc if need be.
I used this to correctly wire up the Y and Z roll joints on my robot ankle. Moving the hand calibration unit will now move the robot ankle.
posted by c6jones720 at 6:57 AM
![]()

0 Comments:
Post a Comment
<< Home