Bilateral Servo control
It is often easiest to implement a robotics project using open loop control systems. In these cases you can quickly make systems but once you have issued a command to the system, you have to assume that it has done its job because there is no way of monitoring it to find out for sure.
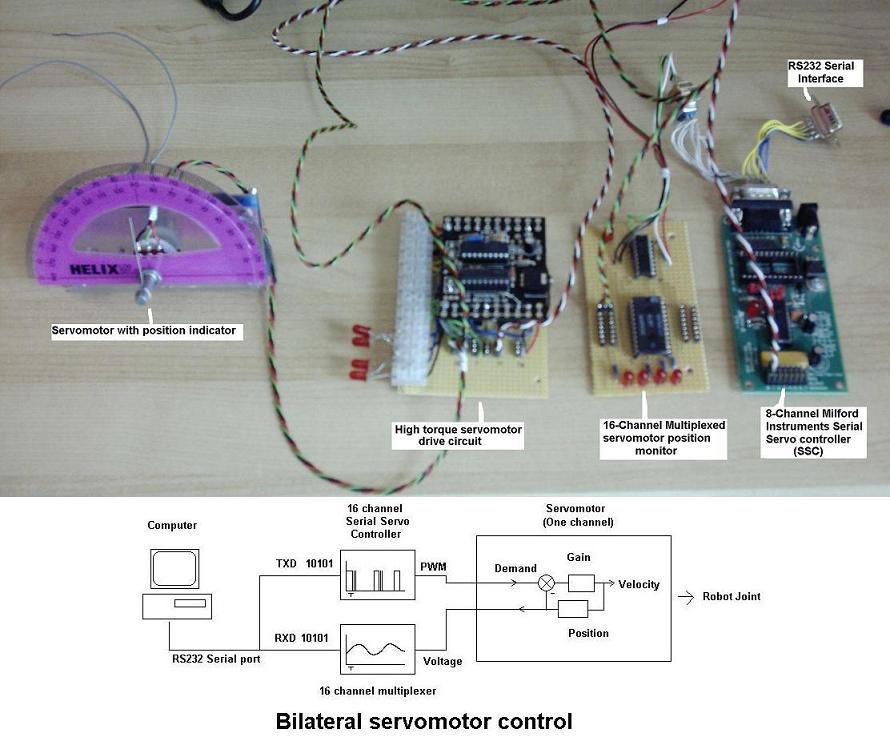
Using off the shelf serial servo controllers (SSC) is a bit like this. They are very good but how do you know the servo motor shaft is where you instructed it to go? Although servos themselves are closed loop feedback systems the SSC is not part of that feedback system, hence the overall system is open loop.
A bipedal robot is quite complex and Ive decided to make it completely closed loop so I can keep tabs on all real world variables at all times. To this end Ive made a 16 channel multiplexed servo position monitor. At any time you can know exactly what angle each servomotor shaft is at.
This system is truly bilateral since the monitor transmits the same data packets as an SSC would receive. This means that connecting the SSC input to the Monitor output for the same servo would actually result in either a positive or a negative closed feedback loop depending on which way you wired up the potentiometer.
posted by c6jones720 at 5:34 AM
|
0 comments
![]()


