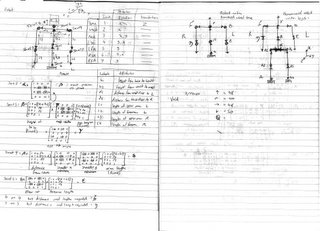
Static Equilibrium On One Leg
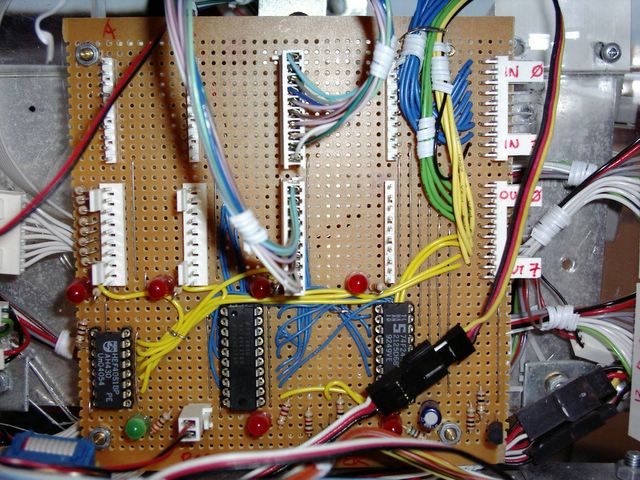
Here are some pics of the right robot leg (I havent made a left leg yet). It is pretty stable thanks to its oversized foot. The motors a powerfull enough to drive the joints to all positions without stalling (and that was only using 3volts!).

Its so stable that I'm pretty sure I could get something like this to take simple steps in an open loop feedback system without any proper controller. - I dont really intend to do this but I think it could work.
As you can see it is pretty close to my original drawing of the robot. I havent decided yet whats going to go above the waist but Im sure it will be a similar style to whats below it...

Thats just balancing statically and most of the joints are set to about 45' to the normal. The weight is noticably at the front of the foot (Where a big toe would be).
posted by c6jones720 at 2:29 AM
|
0 comments
![]()