Modular design
Ive opted for a completely modular design for this robot. To this end nearly every single component (mechanica,l software or electronic) is modular, generic and can also be used somewhere else in the robot.
Ive decided that electrically, every single limb on the robot should be completely self contained so that its only requirements are power and data. Mechanically most of the limbs will be the same because they are all made of the same basic components (when I get to the hands and head this may well change).
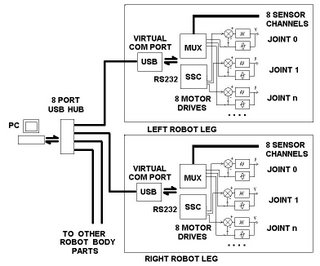
A block diagram for the system roughly follows that shown below:
The software to control the robot is already modular. Ive used C++ and written a class header with generic functions for robot limbs. OO languages are excellent for this sort of thing.
posted by c6jones720 at 8:46 AM
|
0 comments
![]()